Lijsten 3D Object Detection Point Cloud
Lijsten 3D Object Detection Point Cloud. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …

Coolste Sensors Free Full Text 3d Giou 3d Generalized Intersection Over Union For Object Detection In Point Cloud
Grenoble alpes, 38000, grenoble, france 2univ. In this paper, we extend our preliminary work pointrcnn to a. This task is critical for autonomous driving, object manipulation, augmented reality, and. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab.Robust 3d object detection from point clouds with triple attention.
Robust 3d object detection from point clouds with triple attention. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. Grenoble alpes, 38000, grenoble, france 2univ. In this paper, we extend our preliminary work pointrcnn to a. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. Robust 3d object detection from point clouds with triple attention.

解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.. Grenoble alpes, 38000, grenoble, france 2univ. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Few works have attempted to directly detect objects in point clouds. In this paper, we extend our preliminary work pointrcnn to a. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. Object detection in 3d point clouds christian damm matrikelnummer: This task is critical for autonomous driving, object manipulation, augmented reality, and. Computation speed is critical as detection is a necessary component for safety. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.

Few works have attempted to directly detect objects in point clouds. Object detection in 3d point clouds christian damm matrikelnummer: The whole framework is composed of two stages: 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. Grenoble alpes, 38000, grenoble, france 2univ. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.. Object detection in 3d point clouds christian damm matrikelnummer:

In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …. Few works have attempted to directly detect objects in point clouds.. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors.

Computation speed is critical as detection is a necessary component for safety.. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. This task is critical for autonomous driving, object manipulation, augmented reality, and. The whole framework is composed of two stages: Computation speed is critical as detection is a necessary component for safety. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud... In this work, we return to first.

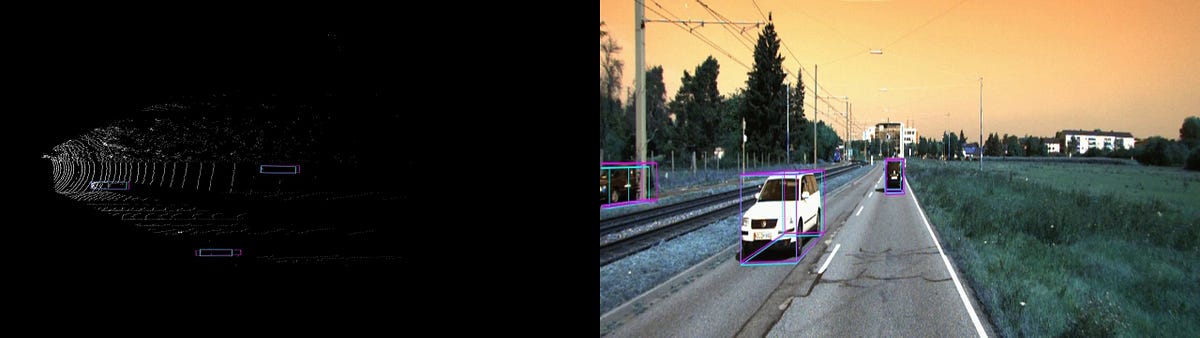
09.06.2018 · detect object in 3d with point cloud and image... . In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …

09.06.2018 · detect object in 3d with point cloud and image... This task is critical for autonomous driving, object manipulation, augmented reality, and. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications.

Robust 3d object detection from point clouds with triple attention.. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. In this work, we return to first.. In this work, we return to first.

In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.

In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes... Object detection in 3d point clouds christian damm matrikelnummer: Computation speed is critical as detection is a necessary component for safety. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. The whole framework is composed of two stages: 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …. Few works have attempted to directly detect objects in point clouds.

Robust 3d object detection from point clouds with triple attention. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. Computation speed is critical as detection is a necessary component for safety. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 09.06.2018 · detect object in 3d with point cloud and image. Grenoble alpes, 38000, grenoble, france 2univ. In this paper, we extend our preliminary work pointrcnn to a. Robust 3d object detection from point clouds with triple attention. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. Object detection in 3d point clouds christian damm matrikelnummer: In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.. 09.06.2018 · detect object in 3d with point cloud and image.

Few works have attempted to directly detect objects in point clouds. Computation speed is critical as detection is a necessary component for safety. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. Object detection in 3d point clouds christian damm matrikelnummer: The whole framework is composed of two stages: Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. 09.06.2018 · detect object in 3d with point cloud and image.. Few works have attempted to directly detect objects in point clouds.

Existing approaches are, however, expensive in computation due to high dimensionality of point clouds.. Object detection in 3d point clouds christian damm matrikelnummer: Grenoble alpes, 38000, grenoble, france 2univ. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. In this paper, we extend our preliminary work pointrcnn to a.

08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications... In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications... The whole framework is composed of two stages:

08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications.. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. Robust 3d object detection from point clouds with triple attention. Few works have attempted to directly detect objects in point clouds. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds; 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.

The whole framework is composed of two stages: This task is critical for autonomous driving, object manipulation, augmented reality, and. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. Robust 3d object detection from point clouds with triple attention. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. The whole framework is composed of two stages: In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … Few works have attempted to directly detect objects in point clouds. Computation speed is critical as detection is a necessary component for safety. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications.

Robust 3d object detection from point clouds with triple attention... 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. The whole framework is composed of two stages: This task is critical for autonomous driving, object manipulation, augmented reality, and. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. Object detection in 3d point clouds christian damm matrikelnummer: Computation speed is critical as detection is a necessary component for safety.

11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud... This task is critical for autonomous driving, object manipulation, augmented reality, and. Computation speed is critical as detection is a necessary component for safety. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. The whole framework is composed of two stages: Few works have attempted to directly detect objects in point clouds.

Robust 3d object detection from point clouds with triple attention... In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. In this paper, we extend our preliminary work pointrcnn to a. Robust 3d object detection from point clouds with triple attention. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. This task is critical for autonomous driving, object manipulation, augmented reality, and. Computation speed is critical as detection is a necessary component for safety. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds... 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;

Robust 3d object detection from point clouds with triple attention. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 09.06.2018 · detect object in 3d with point cloud and image. Grenoble alpes, 38000, grenoble, france 2univ.. Computation speed is critical as detection is a necessary component for safety.

In this work, we return to first... Grenoble alpes, 38000, grenoble, france 2univ. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. Few works have attempted to directly detect objects in point clouds. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. Object detection in 3d point clouds christian damm matrikelnummer: 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds; 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.

This task is critical for autonomous driving, object manipulation, augmented reality, and.. This task is critical for autonomous driving, object manipulation, augmented reality, and. Few works have attempted to directly detect objects in point clouds.

解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the... 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision... Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important.

The whole framework is composed of two stages:. In this work, we return to first. The whole framework is composed of two stages: Robust 3d object detection from point clouds with triple attention. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. Few works have attempted to directly detect objects in point clouds. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds.

Object detection in 3d point clouds christian damm matrikelnummer:. The whole framework is composed of two stages: 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds; 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important.

In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. Object detection in 3d point clouds christian damm matrikelnummer: 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. In this paper, we extend our preliminary work pointrcnn to a. This task is critical for autonomous driving, object manipulation, augmented reality, and. Few works have attempted to directly detect objects in point clouds. Robust 3d object detection from point clouds with triple attention... 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.

Computation speed is critical as detection is a necessary component for safety... The whole framework is composed of two stages: Few works have attempted to directly detect objects in point clouds. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … This task is critical for autonomous driving, object manipulation, augmented reality, and. Grenoble alpes, 38000, grenoble, france 2univ.

Computation speed is critical as detection is a necessary component for safety. Few works have attempted to directly detect objects in point clouds.. Computation speed is critical as detection is a necessary component for safety.

11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.. Few works have attempted to directly detect objects in point clouds. This task is critical for autonomous driving, object manipulation, augmented reality, and.. 09.06.2018 · detect object in 3d with point cloud and image.

21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Object detection in 3d point clouds christian damm matrikelnummer: 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. Computation speed is critical as detection is a necessary component for safety. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. Grenoble alpes, 38000, grenoble, france 2univ. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.

解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.. Robust 3d object detection from point clouds with triple attention. The whole framework is composed of two stages: In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. In this paper, we extend our preliminary work pointrcnn to a.

Computation speed is critical as detection is a necessary component for safety. Few works have attempted to directly detect objects in point clouds. In this work, we return to first. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. The whole framework is composed of two stages: Grenoble alpes, 38000, grenoble, france 2univ. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. Object detection in 3d point clouds christian damm matrikelnummer:

18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab.. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. 09.06.2018 · detect object in 3d with point cloud and image. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. Robust 3d object detection from point clouds with triple attention. Computation speed is critical as detection is a necessary component for safety. Object detection in 3d point clouds christian damm matrikelnummer: The whole framework is composed of two stages: Grenoble alpes, 38000, grenoble, france 2univ. Robust 3d object detection from point clouds with triple attention.

18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. 09.06.2018 · detect object in 3d with point cloud and image.

The whole framework is composed of two stages: Grenoble alpes, 38000, grenoble, france 2univ. Object detection in 3d point clouds christian damm matrikelnummer: This task is critical for autonomous driving, object manipulation, augmented reality, and. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds; The whole framework is composed of two stages: 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors.

In this paper, we extend our preliminary work pointrcnn to a. 09.06.2018 · detect object in 3d with point cloud and image. Grenoble alpes, 38000, grenoble, france 2univ. Computation speed is critical as detection is a necessary component for safety. Object detection in 3d point clouds christian damm matrikelnummer: Few works have attempted to directly detect objects in point clouds. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds.. The whole framework is composed of two stages:
09.06.2018 · detect object in 3d with point cloud and image. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Object detection in 3d point clouds christian damm matrikelnummer: In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. Few works have attempted to directly detect objects in point clouds. Computation speed is critical as detection is a necessary component for safety.

18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 09.06.2018 · detect object in 3d with point cloud and image. This task is critical for autonomous driving, object manipulation, augmented reality, and. In this work, we return to first. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Grenoble alpes, 38000, grenoble, france 2univ. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision.. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.

11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud.. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes.. In this paper, we extend our preliminary work pointrcnn to a.

解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the.. Computation speed is critical as detection is a necessary component for safety. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous.
In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection ….. Computation speed is critical as detection is a necessary component for safety. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. The whole framework is composed of two stages: Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 09.06.2018 · detect object in 3d with point cloud and image. This task is critical for autonomous driving, object manipulation, augmented reality, and. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …

Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;

11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. . In this work, we return to first.

09.06.2018 · detect object in 3d with point cloud and image.. Grenoble alpes, 38000, grenoble, france 2univ. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … The whole framework is composed of two stages: Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. Few works have attempted to directly detect objects in point clouds. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications.
Existing approaches are, however, expensive in computation due to high dimensionality of point clouds... In this paper, we extend our preliminary work pointrcnn to a. This task is critical for autonomous driving, object manipulation, augmented reality, and. Few works have attempted to directly detect objects in point clouds. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. Object detection in 3d point clouds christian damm matrikelnummer: Abstract with the ongoing spread of autonomous vehicles, challenges like obstacle avoidance get more important. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;.. Object detection in 3d point clouds christian damm matrikelnummer:

In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …. Computation speed is critical as detection is a necessary component for safety.

Few works have attempted to directly detect objects in point clouds. Grenoble alpes, 38000, grenoble, france 2univ. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;

In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. Few works have attempted to directly detect objects in point clouds. In this work, we return to first. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. The whole framework is composed of two stages: We utilize the 3d data more efficiently by representing the scene from the bird's eye view (bev), and. 11.12.2018 · in this paper, we propose pointrcnn for 3d object detection from raw point cloud. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. In this paper, we extend our preliminary work pointrcnn to a. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds.

21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors... Computation speed is critical as detection is a necessary component for safety. The whole framework is composed of two stages: 21.04.2019 · current 3d object detection methods are heavily influenced by 2d detectors. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab. 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds; 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision... 增强鲁棒性:exploring the robustness of the 3d object detection in point clouds;
In this paper, we extend our preliminary work pointrcnn to a. Instead of generating proposals from rgb image or projecting point cloud to bird's view or voxels as previous. This task is critical for autonomous driving, object manipulation, augmented reality, and. Object detection in 3d point clouds christian damm matrikelnummer: In this work, we return to first. 3d object detection, lstm, point cloud 1 introduction 3d object detection is one of the fundamental tasks in computer vision. In order to leverage architectures in 2d detectors, they often convert 3d point clouds to regular grids (i.e., to voxel grids or to bird's eye view images), or rely on detection in 2d images to propose 3d boxes. 解决两个问题: 对于hard example上检测的准确率:the detection accuracy of the. Computation speed is critical as detection is a necessary component for safety. Robust 3d object detection from point clouds with triple attention. Few works have attempted to directly detect objects in point clouds. 18.09.2020 · voxelnet a point cloud based 3d object detection algorithm is implemented using google colab.

In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … In this paper, we extend our preliminary work pointrcnn to a. The whole framework is composed of two stages: 08.07.2019 · 3d object detection from lidar point cloud is a challenging problem in 3d scene understanding and has many practical applications. Robust 3d object detection from point clouds with triple attention. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection … In this work, we return to first. Grenoble alpes, 38000, grenoble, france 2univ. This task is critical for autonomous driving, object manipulation, augmented reality, and. 09.06.2018 · detect object in 3d with point cloud and image. Object detection in 3d point clouds christian damm matrikelnummer:.. In continuation with the previous article, we will work out to implement the voxelnet algorithm for the 3d object detection …


